一、研究背景
随着雷达分辨率的提升,扩展目标跟踪技术在自动驾驶、空域监视、海上监视和编队飞行等领域应用广泛。基于随机矩阵模型的扩展目标跟踪方法将目标轮廓建模为椭圆,能联合估计的目标运动学状态与空间扩展状态。但现有方法通常依赖一阶马尔可夫假设,难以刻画真实场景中普遍存在的高阶时序相关性,并且对状态与形状耦合关系的建模能力不足,难以兼顾精度、稳定性与实时性需求。
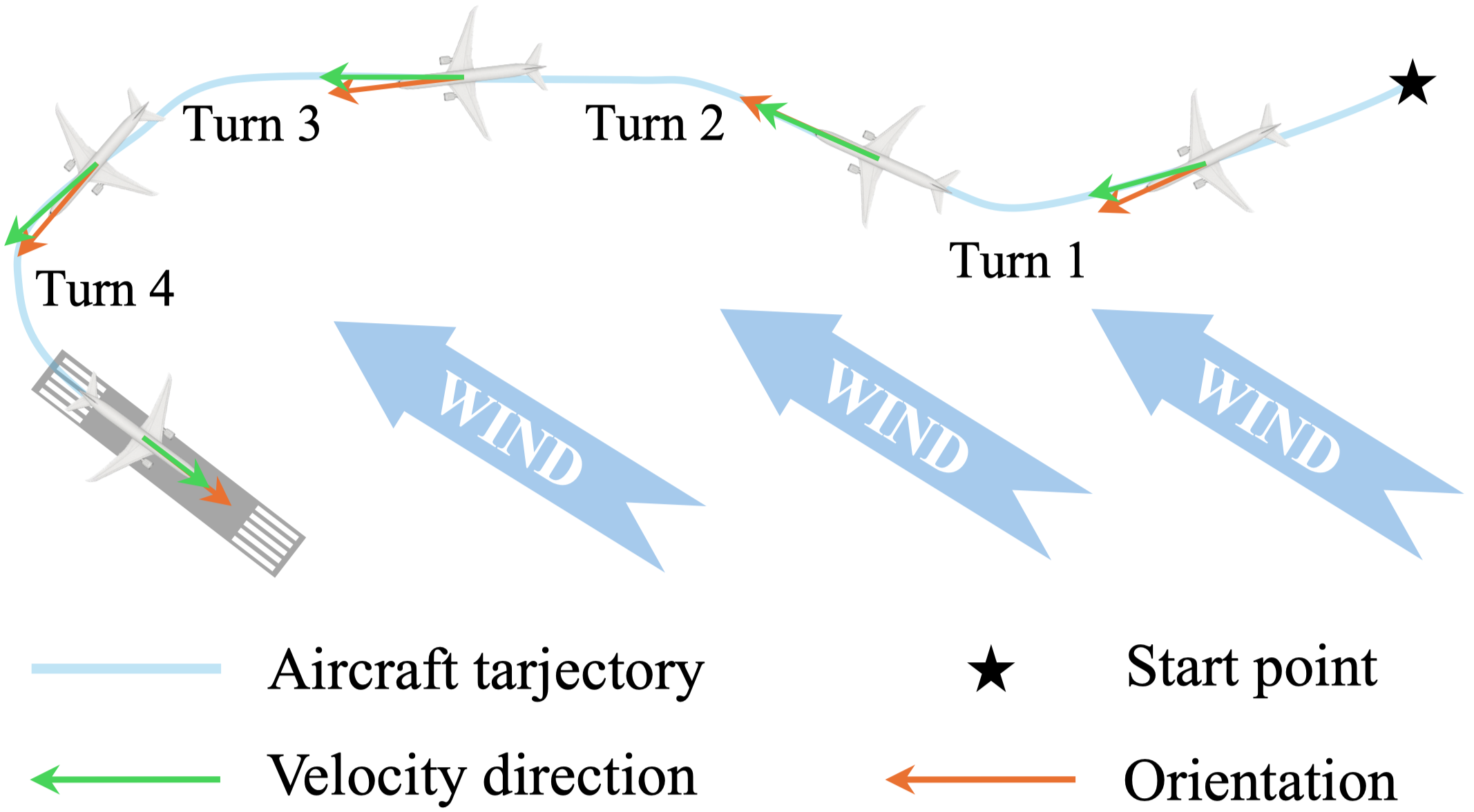
图1 高阶马尔可夫特性与状态—扩展耦合示意图
近期,北京理工大学雷达技术研究院多源探测研究所郑乐教授团队开展研究工作,提出适配于扩展目标的高阶马尔可夫演化模型新理论,并提出基于深度贝叶斯的扩展目标跟踪方法。该方法在贝叶斯滤波框架下引入记忆机制,以近似刻画历史轨迹对当前状态与扩展的持续影响,同时对状态—扩展的联合演化进行解耦。并基于该模型构建由物理先验所驱动的神经网络滤波器,在保证递推可解释的基础上提升复杂机动目标的跟踪精度、稳定性与泛化能力。所开展研究现已发表于信号处理领域顶级期刊IEEE Transactions on Signal Processing (IF=5.8)。
二、论文介绍
论文针对传统随机矩阵扩展目标跟踪方法在高阶运动相关性、状态与扩展耦合关系以及测量模型失配方面存在的不足,建立了面向高阶马尔可夫场景的统一建模框架。通过引入记忆变量,对多时刻历史状态与扩展信息进行隐式压缩表征,将原本难以递推的高维历史依赖问题转化为可处理的近似一阶贝叶斯滤波问题,并为后续联合状态、扩展与记忆变量的闭式推导提供了理论支撑。
具体实现上,所提方法首先利用记忆机制表征目标历史运动模式,并在此基础上完成状态演化误差、扩展演化误差以及测量模型失配误差的联合补偿;随后结合高斯近似与矩匹配,构建联合状态、扩展和记忆变量的贝叶斯滤波闭式表达;最终设计以LSTM为核心的RMMNet网络,由记忆更新模块(MUB)、联合预测模块(JPB)和联合更新模块(JUB)组成,形成图2所示端到端可训练的递推滤波器。

图2RMMNet深度贝叶斯滤波器结构图
利用车辆运动仿真数据与真实飞机降落轨迹数据开展实验,获取训练集和测试集。车辆仿真实验中,共生成1000条目标轨迹,其中800条用于训练,200条用于测试,单条轨迹上的跟踪对比结果如图3所示;真实数据实验采用Northern California TRACON飞机着陆轨迹数据,共包含260条序列,其中208条用于训练,52条用于测试。
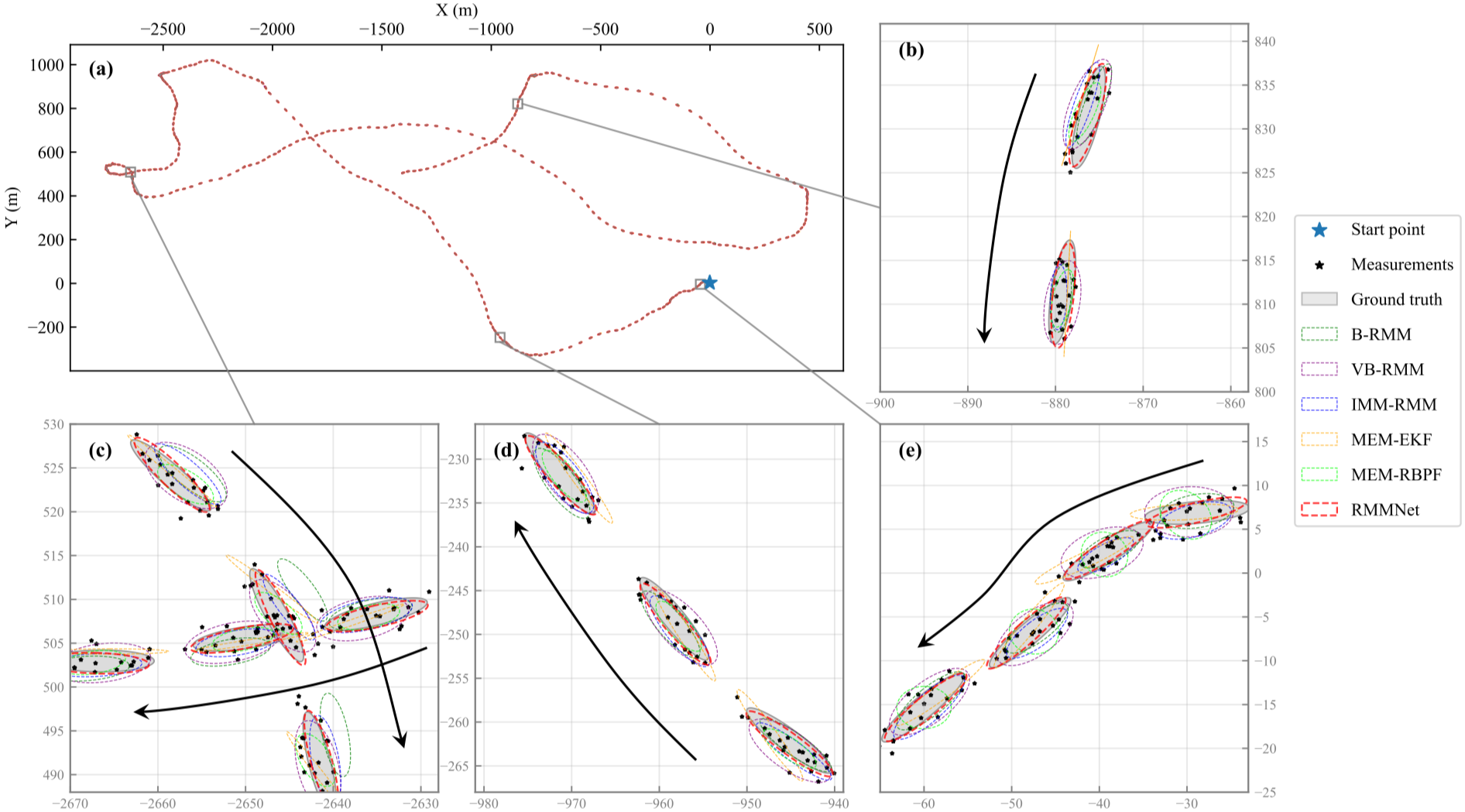
图3车辆运动仿真数据中单个测试样例的跟踪结果可视化
图4(i)和(ii)分别展示了车辆仿真和飞机实测数据集上单个测试样例的跟踪误差对比。从时序误差曲线可以看出,RMMNet能够更有效利用历史信息补偿一阶模型失配,在位置估计、扩展重叠度和高斯—瓦瑟坦距离度量等指标上整体优于传统模型驱动方法及纯数据驱动方法,尤其在数据受限和复杂运动场景下表现出好的鲁棒性与泛化能力。

图4单样例时序误差的可视化。(i)车辆仿真数据集,(ii)飞机实测数据集
该研究工作得到国家自然科学基金基础科学中心项目(62388102),国家自然科学基金面上项目(62401059)的支持。